李曙光团队开发粒子机器人,可像活细胞一样集体迁移
李曙光等人开发的机器人系统表明,单个组件的随机运动可以产生确定性行为,这个过程与生命系统类似,具有环境和医疗方面的应用潜力。
在生物学系统中,大规模行为可以通过小规模组件随机运动的集体耦合和协调来实现。比方说,活细胞在伤口愈合和癌细胞扩散的过程中,会聚集起来集体迁移。
正是受到了这些生物学机制的启发,MIT和哥伦比亚大学的李曙光等人在《自然》近日发表的一篇论文中,报告了一种机器人集群系统:通过将许多可以随机运动的盘状组件松散耦合在一起,就能产生确定性运动。研究结果表明,随机性有望成为开发具有鲁棒确定性行为的大规模机器人集群的突破口。
封面图片:Felice Frankel
在李曙光等人开发的系统中,这些盘状组件无法离开彼此独立运动,也无法实现单独操控。此外,每个组件只能在其半径范围内振荡——伸展和收缩,由此实现运动。作者将这一极简化设置称为“粒子机器人”。在没有外部刺激源的情况下,系统只能做随机运动。但是,通过对这些组件进行编程,调整它们对环境中某个变化信号的响应直径,它们就会朝着信号方向做集体运动。
李曙光等人测试了由24个粒子机器人组成的系统,并模拟了由10万个粒子机器人组成的系统。每个组件在振荡时,直径为15.5-23.5厘米不等。作者证实该系统可以实现鲁棒性运动和物体搬运,以及向光移动和避障(图1)。尤其值得一提的是,作者发现即使20%的组件失效,运动仍能持续,这说明该粒子机器人具有对抗个体组件失效的鲁棒性。
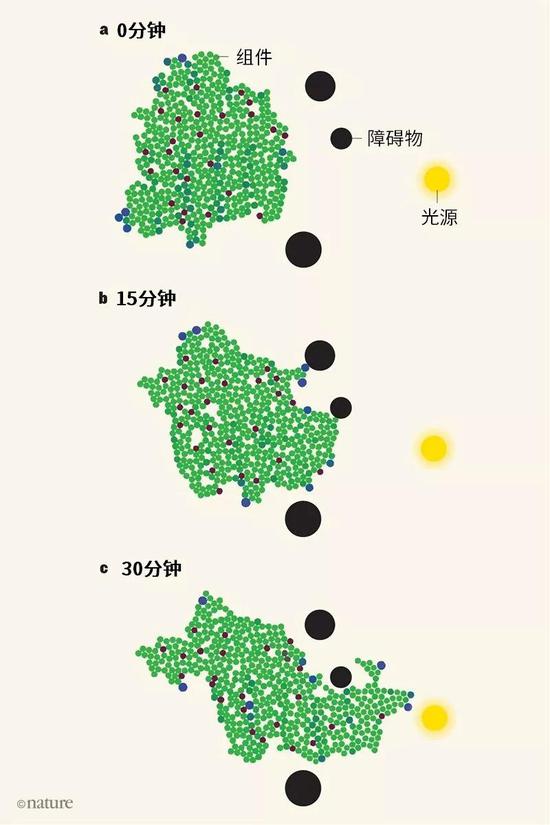
图1 | 创新性集群机器人系统。a-c,李曙光等人报告了一种由许多松耦合、随机运动的厘米级组件构成的机器人系统。每个组件只能在其半径范围内振荡,做伸展和收缩运动。组件的颜色代表其振荡时的直径大小——绿色表示直径最小,蓝色表示直径最大。褐红色为失效组件,专门用来测试系统的鲁棒性。作者表明该系统可以逐渐朝着环境信号来源(如光源)做确定性运动,同时具有避障能力。(改编自Li, S。 et al。 Nature 567, 361–365 (2019)的Fig。 1f。)
在此之前的研究主要关注的是能独立运动、独立操纵的组件,这些组件多基于相对复杂的确定性设计。此前报道的大部分机器人集群系统在可允许的配置范围内,灵活度有限,而那些无定形系统的特定组件则存在可扩展性不足的问题。此外,这些系统中有很多都需要一定程度的集中控制,这进一步限制了它们的能力和可扩展性。
从这方面来说,李曙光等人的粒子机器人方法提供了一种全新选择。除了受到了生物系统的启发,这一技术还借鉴了统计物理学现象,即大量随机组件的整体统计行为可以在无需追踪个体组件的情况下进行建模和操控。因此,相对其他方法来说,这一方法优势显著,尤其是其扩展组件数量和减小单元大小的能力。机器人集群系统需要具备这种扩展能力,才有可能应用在能源开采、工程建设和医学领域。
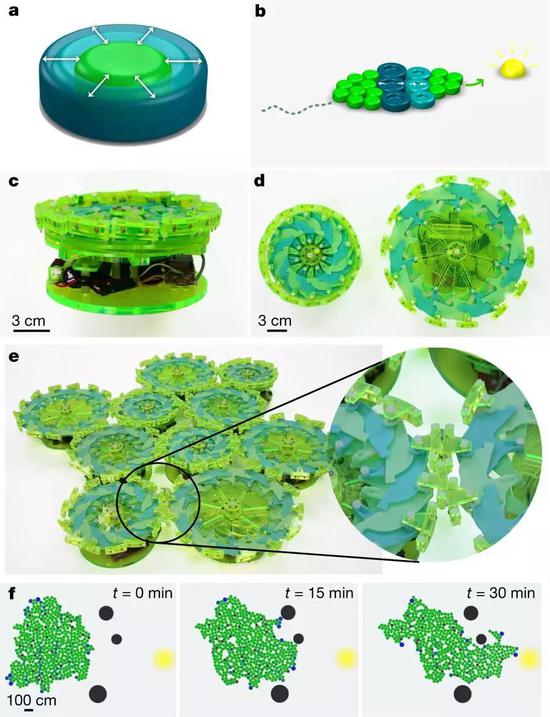
粒子机器人由许多松散耦合的单个“粒子”组成。
Li et al。
当然,作者的系统也存在一些弊端。首先,如果整个集群系统的所在位置没有环境信号梯度,系统将无法朝信号源移动。其二,这些组件一开始需要人为配置位置,因为它们无法通过独立运动彼此交互。其三,试验所展示的组件数量有限,速度相对较慢,体积较大;在不远的将来,这个系统应向数量更多、速度更快、体积更小的方向发展(争取缩小至微米级)。其四,这一技术不适用于定向自组装和自组织成复杂、预设的几何形状,这是由于整个集群具有随机性,组件的放置和耦合也具有不确定性。
随着小规模机器人的不断发展,如今有望设计并制造出大量随机性或确定性组件,使其展现出类似粒子机器人系统的集体和集群行为。过去几年来,通过设计个体单元之间的磁性交互,研究人员已经制造出拥有明确集体行为的移动微尺度机器人集群。对此类机器人集群的主要操控策略一般依赖于单元对远程操控全局场的反应,如磁场。
虽然这会让研究人员难以单独局部地处理每个单元,但却能对单元间的集体耦合交互行为进行全局控制,从而实现可编程的局部交互、自组装和集体行为。这种方法已被用来在空气-水界面实现对合成微型机器人集群的集体二维组装、分解和操控。
李曙光等人的粒子机器人系统,以及大部分其他机器人集群系统主要是二维运动。如果能将它们拓展至三维,提高组件运动行为的复杂度,并让它们能在表面或液体内聚集,就有望提高它们的应用潜力。不过,向三维拓展意味着将要面临许多硬件设计挑战,包括如何实现鲁棒性运动、聚集稳定性、可逆和可编程组件附着方式、小型化和操控。
在不久的将来,很重要的一点是去证实这类机器人集群系统具有其它方法无法实现的重要工程和医疗应用价值。例如,细菌驱动的随机微型游泳机器人也许能够利用这种粒子机器人的方法把药物递送至人体内原本难以达到的目标区域。这类机器人集群或许能根据化学梯度、氧梯度或癌组织环境的pH变化实现定向运动。许多研究已经表明,细菌驱动的微型机器人集群具有靶向药物递送、医疗诊断和环境感知的应用潜力。



-



 ¥
¥/月

购物车空空,快去选购一下哦!
- 会员中心
- 客服
- 意见反馈
-
 APP
APP
下载



