套上这个壳,手机自己“跑步”去充电
编者按:本文来自微信公众号“量子位”(ID:QbitAI),作者:贾浩楠,36氪经授权发布。
周末好不容易休息,瘫在床上的你连给手机充电都懒得动……

可以满足你!首尔国立大学生物机器人实验室开发出了“进击的手机壳”CaseCrawler,带有6个机械腿,可以“一路小跑”到无线充电设施旁边,充电完成后再跑回你的身边。

手机壳底下带有6个“小短腿”,跑起来的摆动频率很高:
这个小东西“腿长”1.6cm,可以轻松爬上和自己的腿一样高的障碍物:
整个小机器人没有装到手机壳上时自重约23克,在负重300克(自重的13倍)的情况下,还能以每秒21cm的速度前进:
不光能能自己跑去充电,回来时还能顺手帮你捎咖啡饼干,真的是省心又贴心的生活小助手。
所以说,人类的懒惰才是科技学技术进步的第一驱动力。
这句话一点没错。
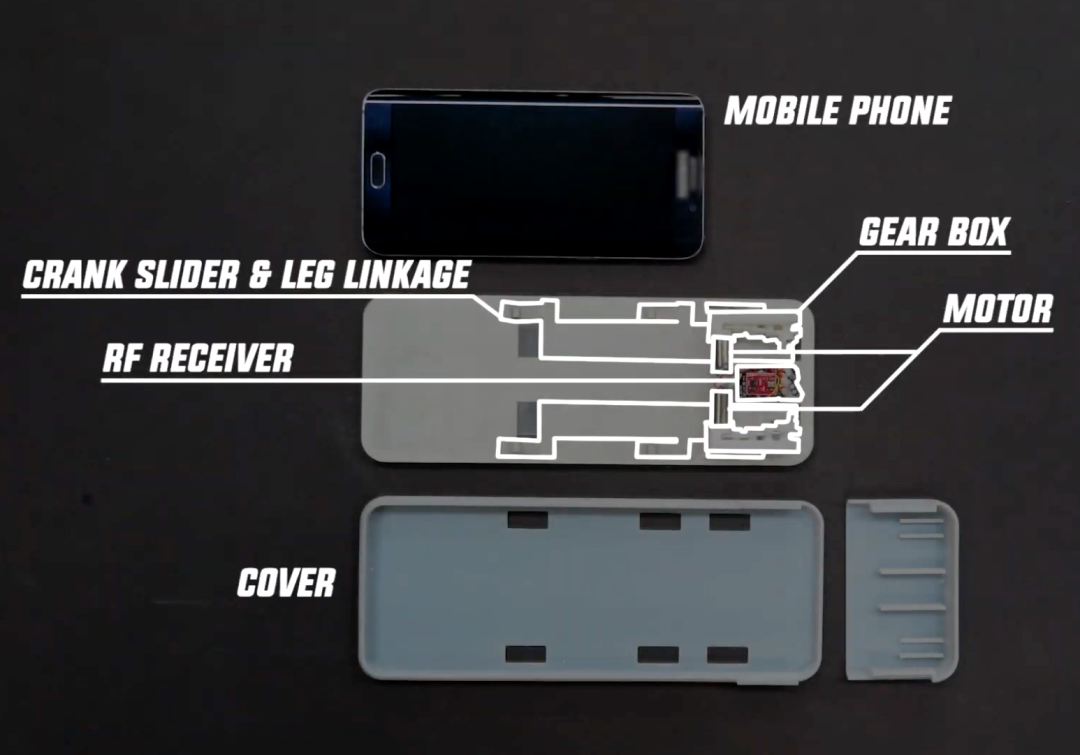
进击的手机壳带有机械腿能够自行前进的微型机器人其实并不罕见,很多团队都开发出了相应产品。但这些机器人整体结构是不规则的,无法整合进一个手机壳中。
CaseCrawler的技术最大的亮点在于它的机械腿,在静止时可以伸展放平,从变速箱向腿部传送动力的齿轮组厚度只有1.5毫米,但轻薄的机械结构却相当结实。
机械腿工作原理跟人类的腿差不多,有一个膝关节单向向前弯曲,一组多连杆(通过变速箱齿轮箱连接到电机上)将腿部推向地面。
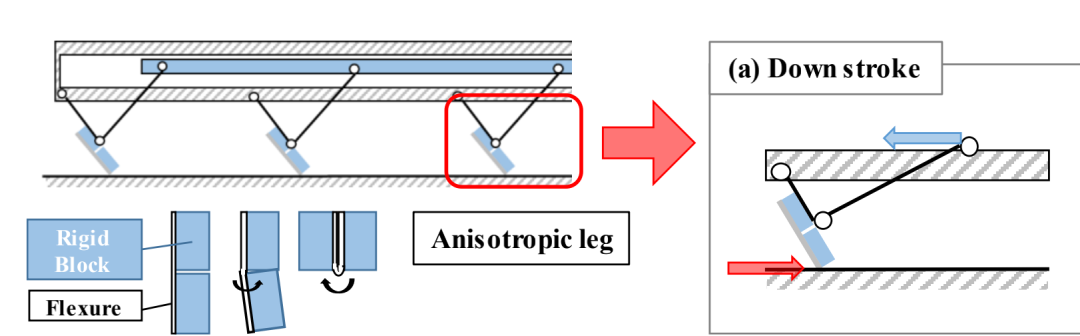
关键设计是由曲柄滑块机构和可伸展收缩的腿部关节与各向异性的着地腿,组成的简化运动链。
连接在腿部关节上的各向异性腿只在前行(向下用力)时向地面传力;在上行时膝关节被动弯曲,避免向后发力。
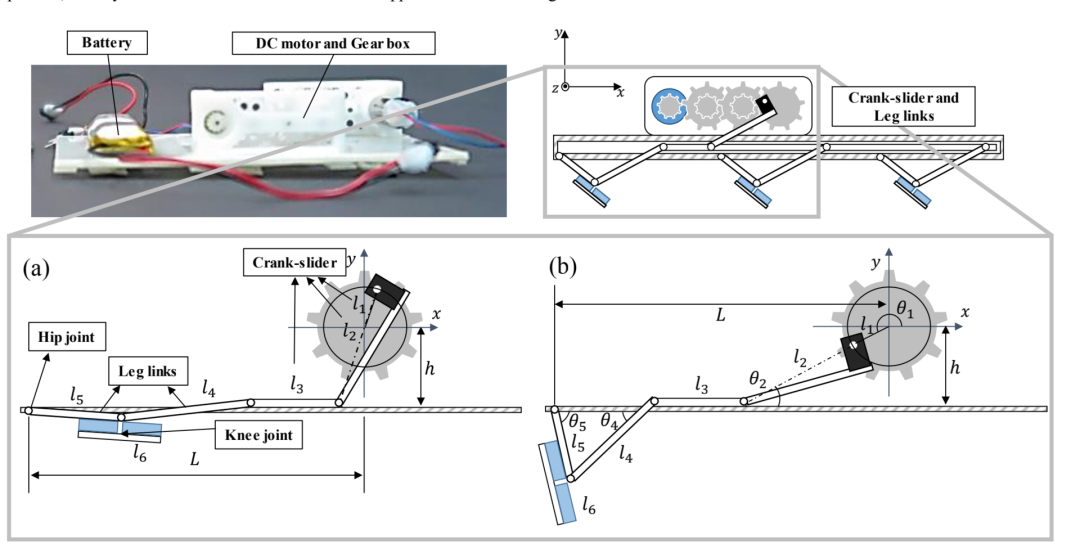
运动链的一部分为曲柄滑块机构,将电机的扭矩传递给其余部分。因此,在重复伸长和缩回的同时,实现了其余部分的摆动运动。
此外,设计的运动链在一个整体平面内运动,通过最大限度地减少关节的横向变形,实现了高效载荷能力。
机器人包含两台电机(MK07-1.7,DIDEL);每台电机负责驱动机器人两侧的支腿,两个电机的转速差实现了机器人的转向。
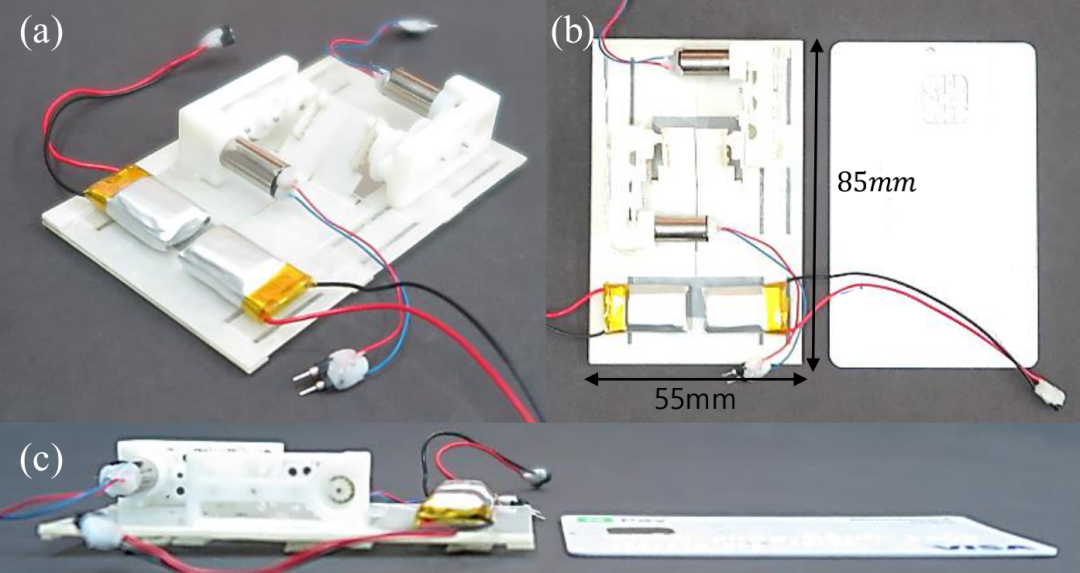
三个3:1的小齿轮串联放置,使高度降到最低,因此齿轮比为27:1。机身采用SCM工艺,尽量降低高度,并在上面铺设安装运动链的沟槽。
运动链由曲柄滑块和支腿链组成,用于将电机的扭矩传递给各向异性的支腿。曲柄滑块和可展开的脚链由PET(0.25T)和织物组成的单层板制造。
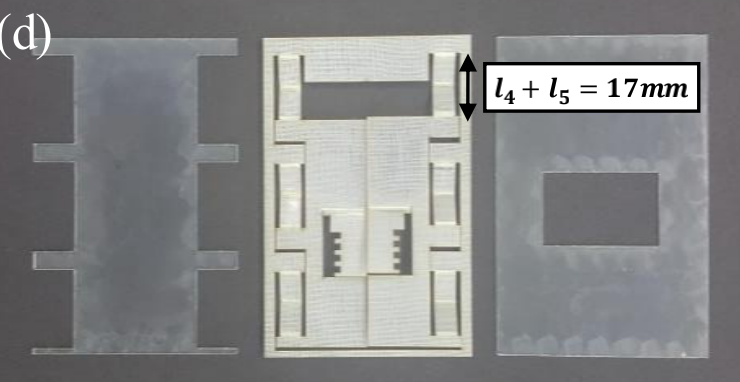
滑块堆叠在两个平行的平面之间,作为滑块的线性导轨;这些导轨产生平滑运动。因此,在完全缩回的状态下,形成一个厚度为1.5毫米的平板体(不含齿轮箱)。
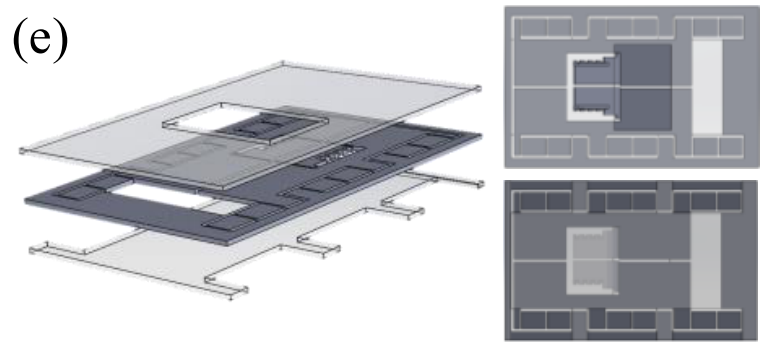
链节的设计满足运动学约束,要求关节的运动范围(ROM)为0到90度。最小角度设置为0度,保持在初始状态下的紧凑;最大角度设置为90度,防止结构被破坏。
曲柄滑块和腿部链接是耦合的,因此,它们应该被一起计算。由关节角的两个远端条件,运动学约束可写成:
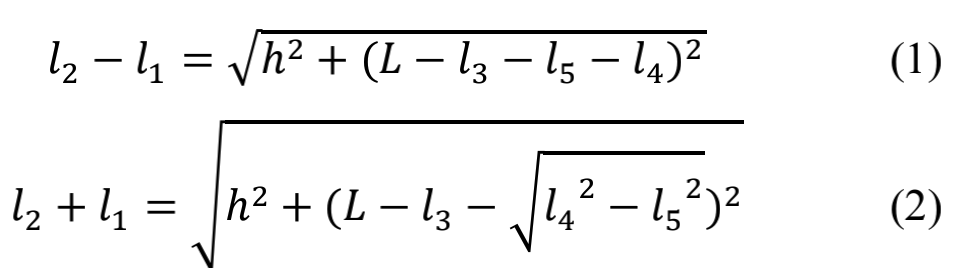
其中变量l1表示曲柄连杆滑块的长度。,l2是连杆长度,l3是滑杆长度,l4、l5是腿部链接装置的高度,h是机体高度,L是输入齿轮和关节之间的长度。
目前,CaseCrawler机器人还是通过遥控器来人为操控,能做到的事情也不过是行走和负重。
但研发团队给出了下一步研究计划,解释了这个小东西的巨大潜力。
潜力巨大的小短腿未来,研究团队计划把机器人与手机的各种传感器互联,比如摄像头、陀螺仪等等,将机器人作为一个多功能载荷平台,进入十分狭小的环境中进行拍摄和其他作业。
而将目标识别等AI模型搭载在机器人的步态和路径选择算法上则可以进一步提高CaseCrawler的实用性,真正实现不需要人手操作的全自动寻路。
研究团队介绍第一作者Jongeun Lee,韩国蔚山科技大学助理教授,首尔国立大学生物机器人实验室研究员。

指导老师Kyu-Jin Cho,首尔国立大学机械与航天工程副教授,软机器人研究中心主任和生物机器人实验室主任。他的研究兴趣包括仿生机器人,软机器人,软性可穿戴设备,使用智能结构的新颖机制以及康复和辅助机器人。

https://spectrum.ieee.org/automaton/robotics/robotics-hardware/casecrawler-adds-tiny-robotic-legs-to-your-phone



-



 ¥
¥/月

购物车空空,快去选购一下哦!
- 会员中心
- 客服
- 意见反馈
-
 APP
APP
下载



