让机器人给自己“刮胡子”?这个美国小伙亲自做了回小白鼠
编者按:本文来自微信公众号“大数据文摘”(ID:BigDataDigest),作者:刘俊寰、朱科锦,36氪经授权发布。

好不容易解禁后的你,现在敢去理发店吗?
长发已经及腰?胡子长度已经可以堪比太乙真人了?
如何在保持安全的社交距离的前提下,如何优雅地修理你的小胡子,就成了当务之急。

这不,国外研究人员就开发了这么一个能够远程剪胡子的机器人,虽然听上去有点不怎么安全呢?(狗头)
而且,为了证明这个机器人的可操作性,现在在东北大学工作的的机器人专家John Peter Whitney决定亲自上阵,充当第一个“小白鼠”,我们先来看看效果如何:

是的,你没有看错,在这个过程中,Whitney真!的!很!紧!张!
在体验了一把机器人刮胡子之后,Whitney也长舒了一口气,成功“活下来”后,Whitney表示,这其实也是他第一次被其他“人”用直剃刀(straight razor)剃胡子。
关于这个机器人的更多详细信息,发表在ArXiv上披露了更多,欢迎来戳:
https://arxiv.org/abs/2004.01269
一个合格的机器人就应该学会刮胡子大家都知道,这些机器人专家对这些“歪门邪道”最有兴趣了。
比如“DRC”和“SubT”这类挑战已经帮助专家们大大推动了相关技术,但是在生活中,很多具体的问题对于机器人来说还是很难实现的,比如接住球、将钉子插入孔中,或使用剃刀剃刮某人的脸而无需理发师给他们涂胶等。
John Peter Whitney这种专家,在他看来,机器人就应该掌握用剃刀刮胡子这项技能。
最近,他在RSS研讨会上作了一个关于“Reacting to Contact”的演讲,主要内容就是基于直剃刀的研究难度,对性能和可靠性的要求。他认为直剃刀对于机器人技术来说是一个有趣且有价值的问题。
说到这次用到的工具“直剃刀”,它有点像安全剃刀(safety razor),只不过…不怎么安全,人类理发师用起来就足够让人心惊胆战了,更不要说机器人。
当利用直剃刀的时候,刀子会紧紧贴近动脉这种地方,光是这点也足够让人担忧了。
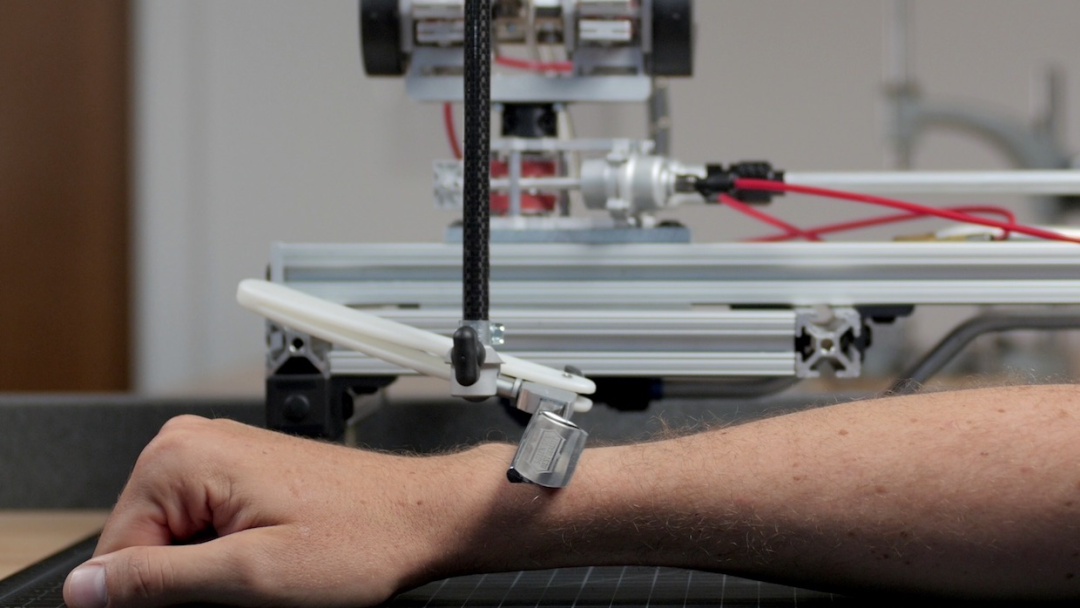
在上脸之前,Whitney先用手臂进行了练习。
但这在Whitney看来都不是什么问题,毕竟这个机器人也不是全自动的刮胡机器人,不过这也可以视为朝着全自动机器人迈出的坚实的第一步,这就对Whiteney开发的硬件的可靠度提出了更高的要求。
这个机器人能否在无人监督的情况下给别人刮胡子呢?Whitney解释道,这与机器人技术中的大多数难题一样,还需要大量的工作,“这包括两个部分,一个是组件本身(软件,电子产品等)的容错能力,第二个是感知和计划算法的质量”。
比如,在自动驾驶汽车上,这类汽车会产生类似或更大的风险,“要学习如何感知、解释和适应,我们需要一个非常高保真的问题模型或大量数据和/或经验,在刮胡子这一领域,两者都非常缺乏”。
他继续类推道:“我认为这是自然而然的过程,人们从封闭道路上的自动驾驶玩具车开始,才能逐渐发展出载人的真正汽车。在机器人操纵方面,我们正开始离开‘玩具车’阶段,针对高后果的棘手问题可以大大推进我们对于机器人的操控能力。”
当然,Whitney的最终目标比创建直线剃须刀机器人要更具有普遍意义,这是一个挑战,过程中还包含了许多子目标,这些目标将为机器人技术的进步做出贡献。

Whitney正在开发中的特殊硬件系统,实际上是探索MRI兼容的远程穿刺活检的试验台,他和他的学生正在与波士顿的布里格姆妇女医院合作,以尝试将这项技术应用于前列腺活检和消融手术。他们还在探索如何将精致的触摸用作绘制环境以及定位的方法,尤其是在视觉效果不是很好的情况下。
Whitney说:“这些特征和行为对于必须与微妙而不确定的环境进行交互的应用程序尤为有趣,例如医疗机器人,辅助和康复机器人和外骨骼,以及多方远程操作系统。”
做出这样的机器人,要经历什么?那么,这个机器人是怎么实现的呢。
首先,在系统设计与建模上,就需要考虑驱动和控制结构、机械设计和试验台安装和系统建模与识别,除此之外,力反馈控制也是不能忽视的一部分。
比如,在进行机械设计的时候,作为流体驱动系统内部流体压力反馈的实验台,研究团队使用了一个滚动膜片驱动的二自由度夹持器。
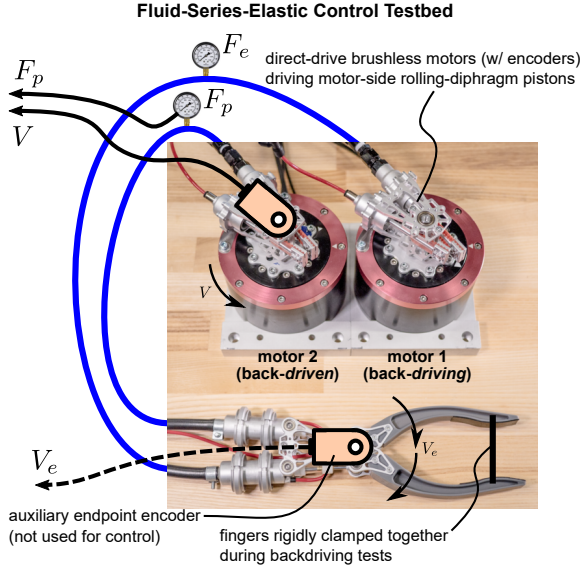
每个执行机构是一个双作用活塞密封低摩擦纤维弹性体滚动隔膜,两个隔膜执行机构驱动独立的手指,提供腕节和夹持夹道;传输的输入端通过纤维增强橡胶软管连接到单独的直驱无刷电机(Akribis ACD120-80),而电机通过中引入的旋转膜片执行器耦合。
该方法结合了软流体执行器的低质量、低摩擦力和直接驱动SEA的可控性和性能。
流体压力记录使用模拟输入EtherCAT终端与16位分辨率,美国数字公司制作最大分辨率为10,000脉冲/转速(40000计数/转速与正交)的临时光学编码器用在系统识别期间测量反驱动手指的位置。低级控制代码使用简单的Open EtherCAT Master (SOEM)库,主控制循环在一个隔离的CPU核心上以2kHz的速度运行。
在测试的时候,设备由流体执行器驱动,驱动器使用可完成初级到次级的力的传导的水管。
其实早在芝加哥IROS 2014,Whitney就介绍了一种优雅的流体致动器系统,这些执行器使用包含流体(如空气或水)的管,以非常有效的方式,基于流体的可压缩性,将力从主机器人传递到次机器人,从而允许顺从性或非常高保真的力反馈。
一条龙服务:机器人理发师不了解一下?疫情期间的手工者们真是一点没闲着,除了远程刮胡子外,剪头发什么的都想好了,完全可以组一个“洗剪吹一条龙服务”。
7月份的时候,这个用iPad为盲人做了一个导航系统的YouTube博主小哥Shane Wighton就脑洞大开,设计了一个剪头发的机器人。
在视频中,Wighton就介绍到,这个剪头发机器人总共由三个部位组成:类似于人的手指,用来夹住要剪的头发;用来控制剪刀移动的部分;用来操作剪刀的部分。
整个机器正式运行的时候是这样的,首先,位于上方的“吸盘”将头发吸起来,然后,机械手把吸起来的头发夹住,最后,“剪刀手”过来剪,听起来…很轻松啊。
但说起来容易做起来难,为了剪出一个还算正常和均匀的发型,Wighton给机器人装了一个环形滑轨。
但是还有一个问题,机器人怎么知道你的头在哪?Wighton利用了深度摄像头,靠人脸识别结合深度数据来确定你的头的位置。并且,为了保证系统的正常工作,Wighton还设计了一个小按钮,用来应对摄像头被遮住的场景,当这个开关碰到头,机械臂就会自动往后退。
除此之外,在发型设计上,Wighton利用了3D建模,用颜色的深浅表示头发的长度,同时为了让机器人知道剪发的角度,比如刘海应该横着剪,耳边周围的头发要沿着耳朵剪,Wighton也在3D模型上进行了标注。
最后剪出来的效果…竟然还不错??
不过最关键的问题是,不管是远程刮胡子还是自动理发,当这项技术真的被普及的时候,你愿意去尝试一下吗?
相关报道:
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/remotely-operated-robot-takes-straight-razor-to-face-of-brave-roboticist



-



 ¥
¥/月

购物车空空,快去选购一下哦!
- 会员中心
- 客服
- 意见反馈
-
 APP
APP
下载



